/* resourcetest.c */
#include "kernel.h"
#include "kernel_id.h"
#include "ecrobot_interface.h"
/* OSEK declarations */
DeclareCounter( SysTimerCnt );
DeclareResource(resource1);
DeclareEvent(event1);
DeclareTask(LowTask);
DeclareTask(HighTask);
/* nxtOSEK hook to be invoked from an ISR in category 2 */
void user_1ms_isr_type2(void)
{
StatusType ercd;
ercd = SignalCounter(SysTimerCnt); /* Increment OSEK Alarm Counter */
if (ercd != E_OK)
{
ShutdownOS(ercd);
}
}
/* Definitions */
#define COUNT 5000000
int digits;
int lowtaskcount;
int hightaskcount;
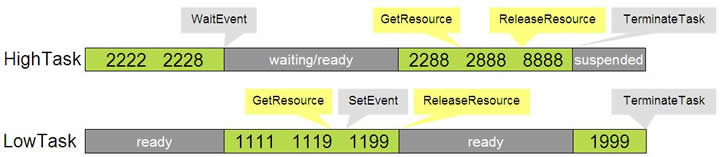
TASK(LowTask)
{
int rcount;
ecrobot_debug1(digits, 1111, 0);
for(rcount = 0; rcount < COUNT; rcount++);
ecrobot_debug1(digits, 1119, 0);
GetResource(resource1); /* Get resource1 */
for(rcount = 0; rcount < COUNT; rcount++) digits++;
SetEvent(HighTask, event1); /* Set event1 to execute HighTask */
ecrobot_debug1(digits, 1199, 0);
for(rcount=0; rcount < COUNT; rcount++) digits--;
ReleaseResource(resource1); /* Release resource1 */
ecrobot_debug1(digits, 1999, 0);
TerminateTask();
}
TASK(HighTask)
{
int rcount;
ecrobot_debug2(digits, 2222, 1);
for(rcount=0; rcount < COUNT; rcount++) digits++;
ecrobot_debug2(digits, 2228, 1);
for(rcount=0; rcount < COUNT; rcount++) digits++;
WaitEvent(event1); /* Waiting for event1 */
ClearEvent(event1);
ecrobot_debug2(digits, 2288, 1);
for(rcount=0; rcount < COUNT; rcount++) digits++;
GetResource(resource1); /* Get resource1 */
ecrobot_debug2(digits, 2888, 1);
for(rcount = 0; rcount < COUNT; rcount++);
ReleaseResource(resource1); /* Release resource1 */
ecrobot_debug2(digits,8888 , 1);
TerminateTask();
}