Blutooth通信によるNXT内部データのロギング
リアルタイム制御用組込みソフトウェアのデバッグは容易ではありません。デバッガを用いることで任意のコードをステップ実行することができますが、例えばNXTway-GSの倒立制御アルゴリズムのデバッグに適用することは困難です(ステップ実行では制御自体が成立しません)。そのため、リアルタイム制御用組込みソフトウェアの開発では、プログラム実行中の実機の内部挙動を確認するための専用計測ツールが一般的に用いられます。nxtOSEKではBluetooth通信によるNXT内部データのロギング用API (ecrobot_bt_data_logger)を提供しており、NXT GamePad によるNXT内部データロギングに対応しています。また、データロギングの停止時にはロギングデータを任意のCSVファイルとして保存することができます。
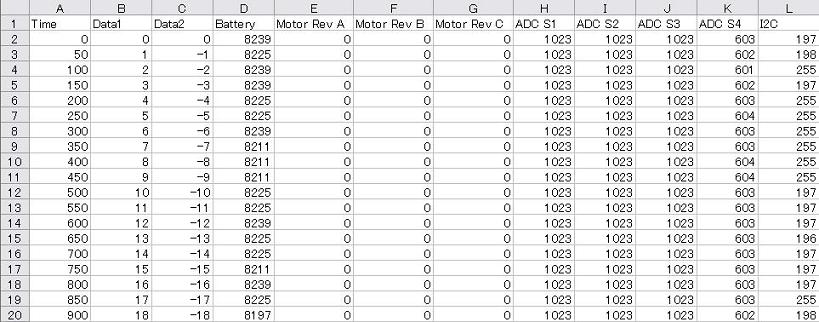
samples\datalogging\data.csv
CSVファイルには次のデータが保存されます。
Time: データ取得タイムスタンプ [msec]
Data1/Data2: ユーザー選択データ
Battery: バッテリ電圧 [mV]
Motor Rev A/B/C: ポートA/B/Cの各モータ回転角度 [度]
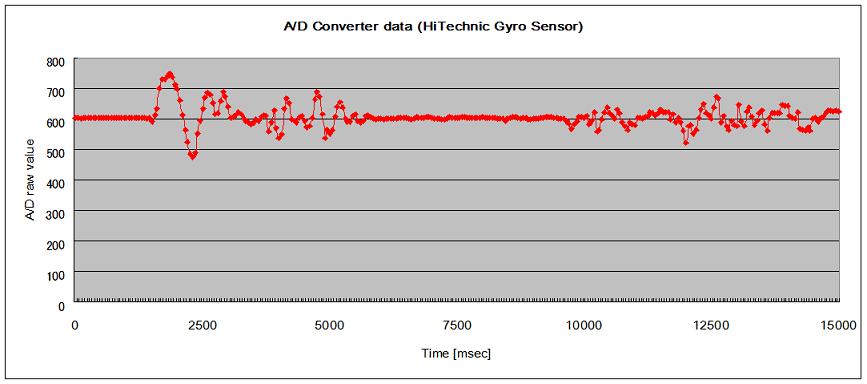
ADC S1/S2/S3/S4: ポートS1/S2/S3/S4の各A/Dセンサ生データ
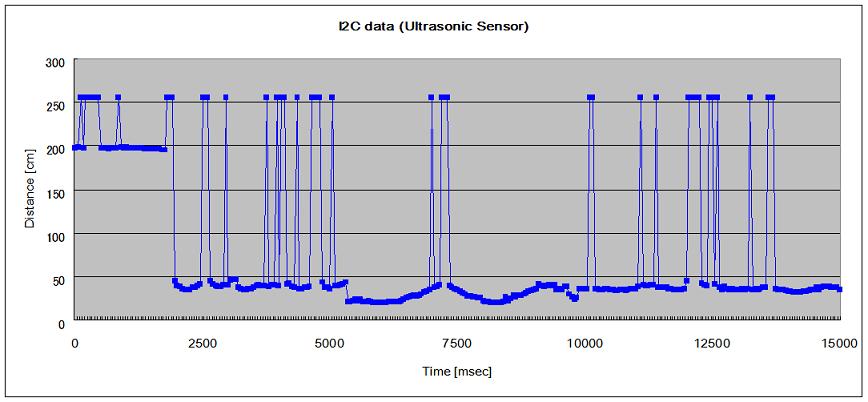
I2C: 超音波センサ距離データ [cm]
CSVファイルに保存されたデータをMicrosoft ExcelやMATLABなどのソフトウェアを用いて解析することも可能です。


samples\datalogging\datalogging.c
|
samples\datalogging\datalogging.oil
|
Back to Samples