NXT internal data logging via Bluetooth
Debugging a real-time control embedded software is a diffucult job even if you had a powerful debugger (setting break point at the specific line does not help you to debug a NXTway-GS...). So typical real-time control software developer uses some data measurement tool to analyze the run time behavior of the application. nxtOSEK provides a Bluetooth data logging API (ecrobot_bt_data_logger) and this API sends pre-configured data (Sensor data, Motor rev and internal status) to the NXT GamePad utility on the host PC. If you stop a data logging, you can save all logging data into a CSV file, then you can analyze what was happened inside of your NXT.
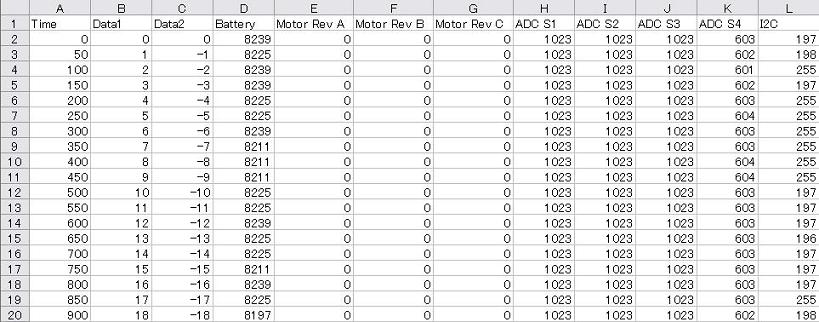
samples\datalogging\data.csv
Saved CSV file contains the below data.
Time: time stamp in msec
Data1/Data2: user configurable data
Battery: battery voltage im mV
Motor Rev A/B/C: motor revolutions in degree for all three ports
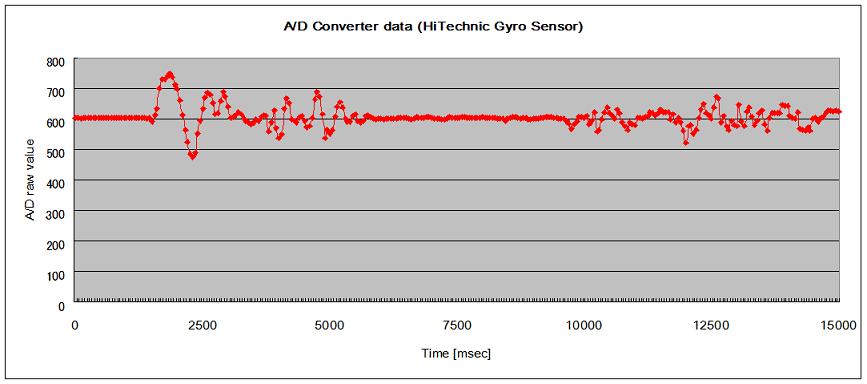
ADC S1/S2/S3/S4: A/D Sensor raw data for all four ports
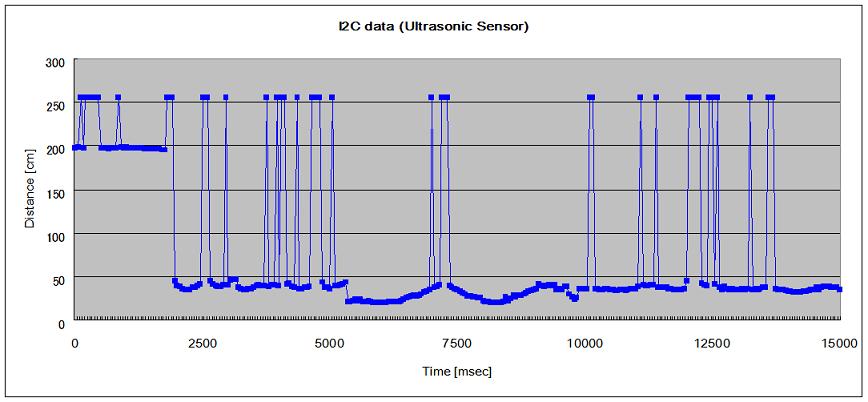
I2C: Ultrasonic Sensor data in cm
You can visualize the logging data in data analysis software (e.g. Microsoft Excel, MATLAB...)


samples\datalogging\datalogging.c
|
samples\datalogging\datalogging.oil
|
Back to Samples